|
|

|

|
| e-Pub |
Section: New Results
3D object and scene modeling, analysis, and retrieval
The joint image handbook
Participants : Matthew Trager, Martial Hebert, Jean Ponce.
Given multiple perspective photographs, point correspondences form the “joint image”, effectively a replica of three-dimensional space distributed across its two-dimensional projections. This set can be characterized by multilinear equations over image coordinates, such as epipolar and trifocal constraints. In this work, we revisit the geometric and algebraic properties of the joint image, and address fundamental questions such as how many and which multilinearities are necessary and/or sufficient to determine camera geometry and/or image correspondences. Our new theoretical results answer these questions in a very general setting, and our work, published ICCV 2015 [17] , is intended to serve as a “handbook” reference about multilinearities for practitioners.
Trinocular Geometry Revisited
Participants : Jean Ponce, Martial Hebert, Matthew Trager.
When do the visual rays associated with triplets of point correspondences converge, that is, intersect in a common point? Classical models of trinocular geometry based on the fundamental matrices and trifocal tensor associated with the corresponding cameras only provide partial answers to this fundamental question, in large part because of underlying, but seldom explicit, general configuration assumptions. In this project, we use elementary tools from projective line geometry to provide necessary and sufficient geometric and analytical conditions for convergence in terms of transversals to triplets of visual rays, without any such assumptions. In turn, this yields a novel and simple minimal parameterization of trinocular geometry for cameras with non-collinear or collinear pinholes, which can be used to construct a practical and efficient method for trinocular geometry parameter estimation. This work has been published at CVPR 2014, and a revised version that includes numerical experiments using synthetic and real data has been submitted to IJCV [25] .
24/7 place recognition by view synthesis
Participants : Akihiko Torii, Relja Arandjelović, Josef Sivic, Masatoshi Okutomi, Tomas Pajdla.
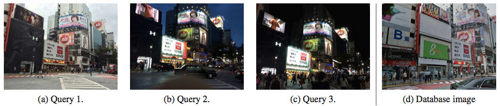
We address the problem of large-scale visual place recognition for situations where the scene undergoes a major change in appearance, for example, due to illumination (day/night), change of seasons, aging, or structural modifications over time such as buildings built or destroyed. Such situations represent a major challenge for current large-scale place recognition methods. This work has the following three principal contributions. First, we demonstrate that matching across large changes in the scene appearance becomes much easier when both the query image and the database image depict the scene from approximately the same viewpoint. Second, based on this observation, we develop a new place recognition approach that combines (i) an efficient synthesis of novel views with (ii) a compact indexable image representation. Third, we introduce a new challenging dataset of 1,125 camera-phone query images of Tokyo that contain major changes in illumination (day, sunset, night) as well as structural changes in the scene. We demonstrate that the proposed approach significantly outperforms other large-scale place recognition techniques on this challenging data. This work has been published at CVPR 2015 [16] . Figure 1 shows examples of the newly collected Tokyo 24/7 dataset.
|
NetVLAD: CNN architecture for weakly supervised place recognition
Participants : Relja Arandjelović, Petr Gronat, Akihiko Torii, Tomas Pajdla, Josef Sivic.
In [21] , we tackle the problem of large scale visual place recognition, where the task is to quickly and accurately recognize the location of a given query photograph. We present the following three principal contributions. First, we develop a convolutional neural network (CNN) architecture that is trainable in an end-to-end manner directly for the place recognition task. The main component of this architecture, NetVLAD, is a new generalized VLAD layer, inspired by the "Vector of Locally Aggregated Descriptors" image representation commonly used in image retrieval. The layer is readily pluggable into any CNN architecture and amenable to training via backpropagation. Second, we develop a training procedure, based on a new weakly supervised ranking loss, to learn parameters of the architecture in an end-to-end manner from images depicting the same places over time downloaded from Google Street View Time Machine. Finally, we show that the proposed architecture obtains a large improvement in performance over non-learnt image representations as well as significantly outperforms off-the-shelf CNN descriptors on two challenging place recognition benchmarks. This work is under review. Figure 2 shows some qualitative results.
